
内容简介
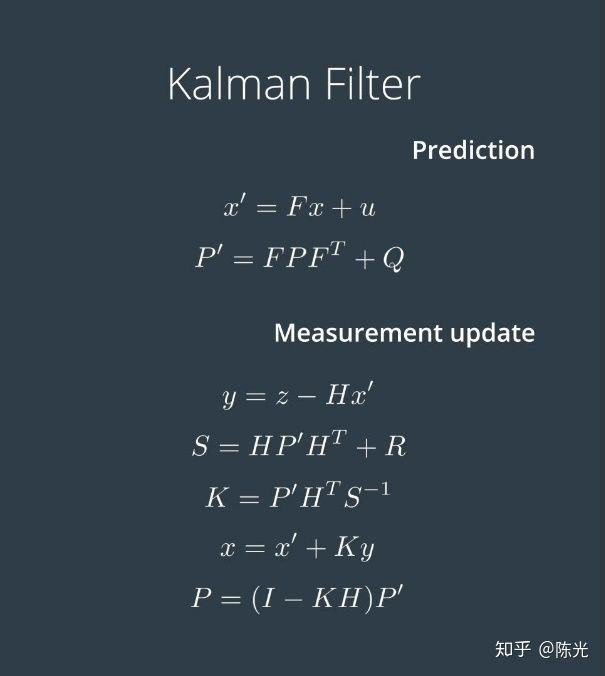
无人驾驶技术入门(十三)| 手把手教你写卡尔曼滤波器》以一个匀速运动小车的模型为例,让读者从感性上认识了卡尔曼滤波器的基本原理,它包含预测(Prediction)和测量值更新(Measurement update)两大过程。预测和测量值更新的交替执行,实现了卡尔曼滤波在状态估计中的闭环。
随后,我从理性分析的角度,以无人驾驶中激光雷达测量障碍物位置的数据为例,结合卡尔曼滤波所用到的公式,使用C++和矩阵运算库Eigen一步步实现了卡尔曼滤波器预测和测量值更新这两大过程的代码。
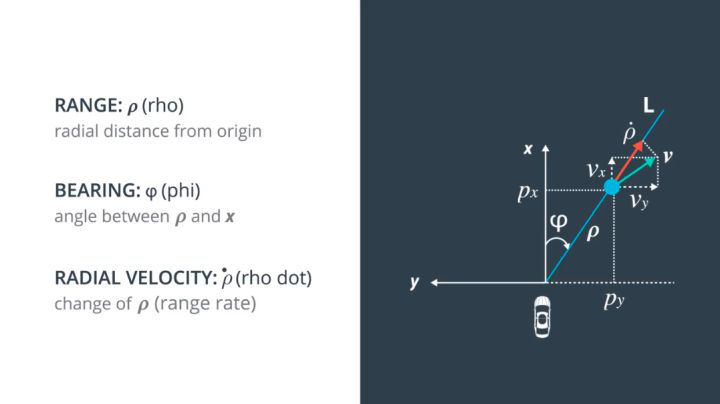
在本次分享中,我将以优达学城(Udacity)无人驾驶工程师学位中提供的传感器融合项目为例,介绍如何利用扩展卡尔曼滤波解决跟踪毫米波雷达目标的问题。由于本次内容为卡尔曼滤波器的进阶内容,推荐读者先阅读《无人驾驶技术入门(十三)| 手把手教你写卡尔曼滤波器》,了解预测和测量值更新这两个步骤所使用到的公式及其含义,再看此篇。
点击阅读
类似推荐
- 作者简介

版权所有:重庆临菲电子科技有限公司 Copyright 2012-2018 渝ICP备12008020号-1 邮编:400041
联系电话:023-68962046 邮箱:ilynchpin@lynchpin.com.cn 重庆市九龙坡区科园三路 5 号 2-2-1
 渝公网安备 50010702502670号
渝公网安备 50010702502670号