
内容简介
无人驾驶技术入门软件篇已经介绍了传感器数据的解析和传感器信息的坐标转换,这两步完成后,我们就会获得某一时刻,自车坐标系下的各种传感器数据,这些数据包括障碍物的位置、速度;车道线的曲线方程、车道线的类型和有
效长度;自车的 GPS 坐标等等。这些信号的组合,表示了无人车当前时刻的环境信息。
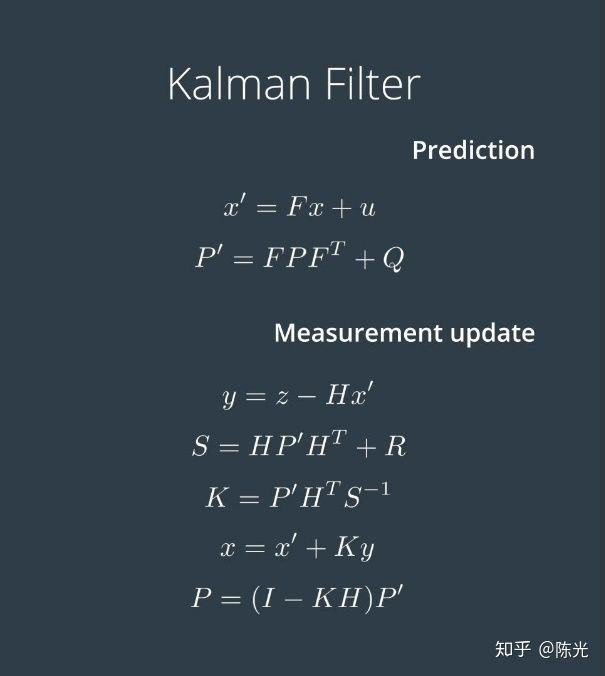
由于传感器本身的特性,任何测量结果都是有误差的。以障碍物检测为例,如果直接使用传感器的测量结果,在车辆颠簸时,可能会造成障碍物测量结果的突变,这对无人车的感知来说是不可接受的。因此需要在传感器测量结果的基础上,进行跟踪,以此来保证障碍物的位置、速度等信息不会发生突变。
类似推荐




- 作者简介

版权所有:重庆临菲电子科技有限公司 Copyright 2012-2018 渝ICP备12008020号-1 邮编:400041
联系电话:023-68962046 邮箱:ilynchpin@lynchpin.com.cn 重庆市九龙坡区科园三路 5 号 2-2-1
 渝公网安备 50010702502670号
渝公网安备 50010702502670号