

内容简介
上一次的分享里,我介绍了 GPS+IMU 这组黄金搭档,这两个传感器的组合能够实现城区道路自动驾驶的稳定定位功能,解决了第一个大问题“我”在哪的问题。
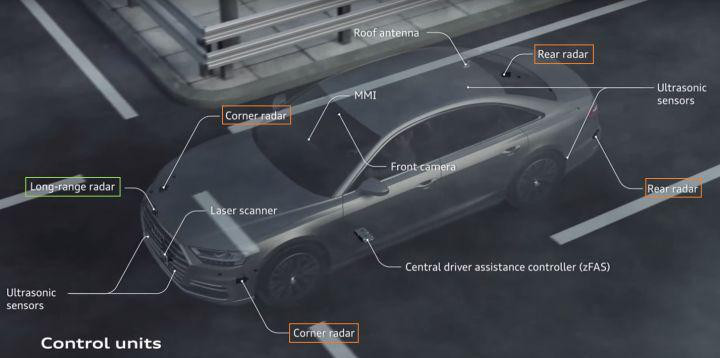
为了能让无人车能像人一样,遇到障碍物或红灯就减速,直到停止;遇到绿灯或前方无障碍物的情况,进行加速等操作。这就需要车载传感器去周围的环境进行感知。
应用于无人车上的传感器目前有四大类,分别是摄像机,激光雷达、毫米波雷达和超声波雷达。不同的传感器根据其传感特性,布置在车身的不同位置。
类似推荐


- 作者简介

版权所有:重庆临菲电子科技有限公司 Copyright 2012-2018 渝ICP备12008020号-1 邮编:400041
联系电话:023-68962046 邮箱:ilynchpin@lynchpin.com.cn 重庆市九龙坡区科园三路 5 号 2-2-1
 渝公网安备 50010702502670号
渝公网安备 50010702502670号