
内容简介
在第十一期的分享中,我以CAN总线的解析为例,介绍了如何通过解析CAN总线的消息,获取传感器的数据。这一期的分享将会集中在如何将传感器坐标系下的数据转换到自车坐标系下。
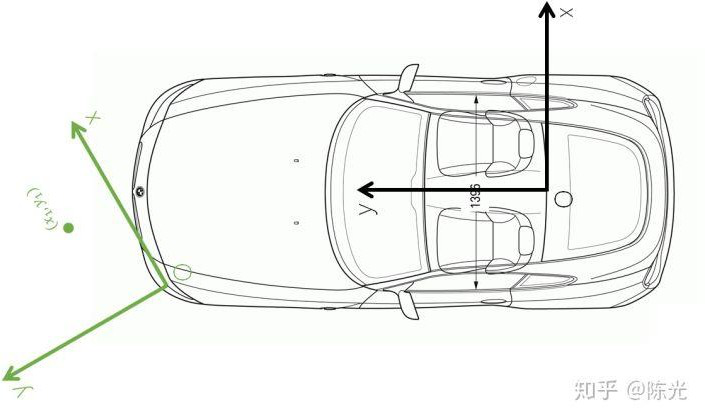
无人车上拥有各种各样的传感器,每个传感器的安装位置和角度又不尽相同。对于传感器的提供商,开始并不知道传感器会以什么角度,安装在什么位置,因此只能根据传感器自身建立坐标系。无人驾驶系统是一个多传感器整合的系统,需要将不同位置的传感器数据统一到一个固定的坐标系——自车坐标系下,才能分析当前无人车所在的道路场景。
点击阅读
点击阅读
类似推荐



- 作者简介

版权所有:重庆临菲电子科技有限公司 Copyright 2012-2018 渝ICP备12008020号-1 邮编:400041
联系电话:023-68962046 邮箱:ilynchpin@lynchpin.com.cn 重庆市九龙坡区科园三路 5 号 2-2-1
 渝公网安备 50010702502670号
渝公网安备 50010702502670号